Project Title:
No-Power Bionic Lower Extremity Prosthesis (Caesar Foot)
Summary:
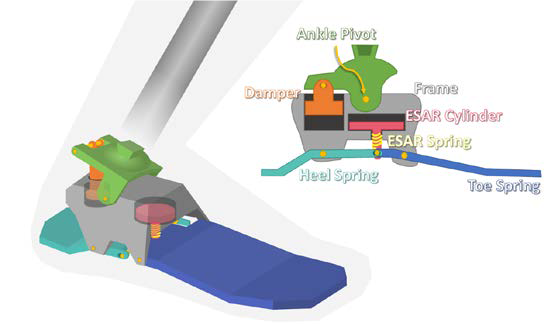
Most existing ankle-foot prosthetic devices cannot fully replace the physiologic function of the intact joint and musculature of the lower limb. For passive prostheses, there is an inherent trade-off between energy storage and range of motion (ROM) at the ankle. In order to store energy, the foot must be stiff; however, to get the necessary ankle motion during ambulation, more compliance is needed. Current Energy Storage and Return (ESR) feet can only supply less than 1/8th of the peak power and less than half of the energy of an intact limb and provide substantially less than the 66o range of motion (ROM) that exists in the intact ankle. The reduced ankle push-off and limited ROM likely lead to compensations at other joints and the contralateral limb, and it contributes to the increased metabolic cost of ambulation for amputees. To provide lower-limb amputees with a passive foot/ankle prosthesis with more normalized ankle biomechanics and function, we are developing the Compliant Adaptive Energy Storing and Return Foot (CAESAR) foot.
Funding:
This work is supported by Congressionally Directed Medical Research Programs (CDMRP) and the US Army Medical Research and Materiel Command (USAMRMC) under Contract No. W81XWH-19-C-0031. The views, opinions and/or findings contained in this report are those of the author(s) and should not be construed as an official Department of Army position, policy or decision unless so designated by other documentation. In the conduct of research where humans are the subjects, the investigator(s) adhered to the policies regarding the protection of human subjects as prescribed by Code of Federal Regulations (CFR) Title 45, Volume 1, Part 46; Title 32, Chapter 1, Part 219; and Title 21, Chapter 1, Part 50 (Protection of Human Subjects).
Expected Completion Date:
February 10, 2021